金陵飞碟
金陵飞碟
团队自研的碟式构型水下机器人,可以实现极低阻力的航向调整,在水下观测与作业任务中,具有极大的外形优势。碟式水下机器人可搭载多种机械臂,各类摄像头等外设。舱内装备了自主研发的深度解算板、运动控制器和电源管理模块,深度解算板采用了多源数据融合,可以提供深度方向的位置和速度信息;运动控制器可以控制多达16个通道的执行器,支持常见的UART,IIC等数据接口以及2路高速CAN和1路百兆以太网;电源管理模块支持对多路电源的通断控制,并支持过流保护和电流计、功率计以及能量计等功能。运动控制算法中加入了四元数反馈控制,可以实现任意姿态的悬停作业。
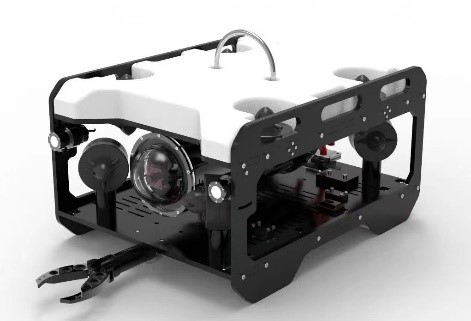
徽京水王
团队使用主流的八推进器开架式水下机器人,挂载单自由度机械臂,在水下作业方面具有极高的稳定性。机器人使用了带有云台的相机,可以对机器人前方视野的完全观测。使用电力载波实现水下的数据传输,在水下机器人终端与上位机之间,设计了一种基于无线网桥的定向通讯方式,实现了操作手和水下机器人的无线通讯与控制,并较好的解决了通讯延迟问题。针对特殊的任务需求,设计了可更换的视觉模组,借助舱内相机实现与舱内数据的电气隔离,具有快捷可靠,易于开发的优势。